Aplicação para se obter dados coerentes de uma IMU (parte 1)
1 - IMU (Unidade Inercial de Medidas)
Nesse primeiro teste, iremos utilizar o sensor MPU6550 que contém um acelerômetro e um giroscópio, fornecendo 6 DOF (graus de liberdade), além de um sensor de temperatura. (Detalhes do funcionamento em: https://www.embarcados.com.br/sensores-inerciais-parte-2/)
-
O acelerômetro fornece os dados de aceleração nos 3 eixos em [latex] [m/s^2] [/latex] ([latex] a_x [/latex], [latex] a_y [/latex] e [latex] a_z [/latex]).
-
O giroscópio fornece a variação dos ângulos nos 3 eixos em [latex][°/s][/latex] ([latex] \dot{\phi} [/latex], [latex] \dot{\theta} [/latex] e [latex] \dot{\psi}[/latex]).
Vamos tratar aqui de como obter os ângulos pitch [latex] (\theta) [/latex] e roll [latex] (\phi) [/latex], mostrados na Figura 1.
Figura 1 - Eixos de referência.
2 - Montagem
A conexão entre o MPU6050 e o ESP32 (Dev Kit) é feita por meio da comunicação I2C. Os pinos 22 e 23 foram utilizados, respectivamente, como pino SDA (dados) e pino SCL (clock). A alimentação do MPU6050 utilizada foi de 3,3V (fornecida pelo próprio ESP32) e o GND foi interligado. Mais detalhes podem ser vistos na Figura 2.
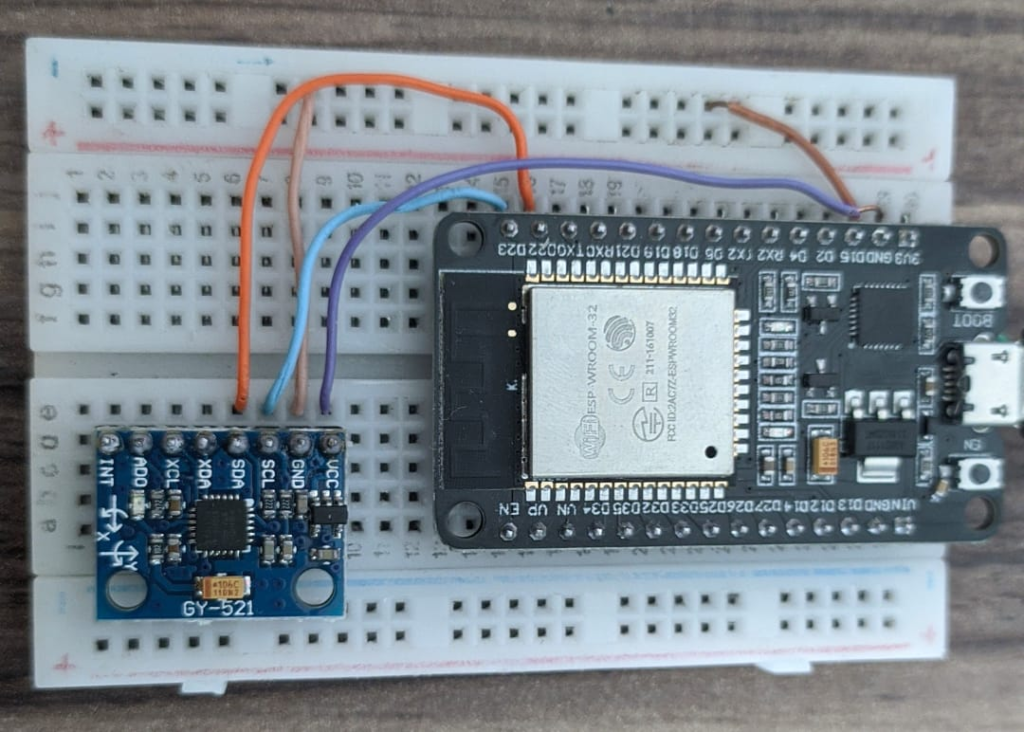
Figura 2 - Montagem ESP32 + MPU6050.
3 - Código embarcado
Como a ideia é testar o filtro de Kalman, optou-se por implementá-lo em python. Dessa forma, o ESP32 é responsável apenas por fazer a leitura da IMU e enviar os dados para o computador (conexão usb-serial).
Compile e faz o envio do seguinte código para o ESP32:
#include<Wire.h>
const int MPU_addr=0x68; // I2C address of the MPU-6050
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
float AccX, AccY, AccZ;
float GyroX, GyroY, GyroZ;
float elapsedTime = 0.0, currentTime = 0.0, previousTime = 0.0;
void setup(){
Wire.begin(22,23);
Wire.beginTransmission(MPU_addr);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0x00); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Wire.beginTransmission(MPU_addr); // inicia comunicação com endereço do MPU6050
Wire.write(0x1B); // envia o registro com o qual se deseja trabalhar
Wire.write(0x00); // escreve o valor no registro
Wire.endTransmission(true); // termina a transmissão
Serial.begin(115200);
}
void loop(){
// === Read acceleromter data === //
Wire.beginTransmission(MPU_addr);
Wire.write(0x3B); // Start with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU_addr, 6, true); // Read 6 registers total, each axis value is stored in 2 registers
//For a range of +-2g, we need to divide the raw values by 16384, according to the datasheet
// and for correct conversion you must use int16_t
AccX = int16_t(Wire.read() << 8 | Wire.read()) / 16384.0; // X-axis value
AccY = int16_t(Wire.read() << 8 | Wire.read()) / 16384.0; // Y-axis value
AccZ = int16_t(Wire.read() << 8 | Wire.read()) / 16384.0; // Z-axis value
// === Read gyro data === //
Wire.beginTransmission(MPU_addr);
Wire.write(0x43); // Gyro data first register address 0x43
Wire.endTransmission(false);
Wire.requestFrom(MPU_addr, 6, true); // Read 4 registers total, each axis value is stored in 2 registers
GyroX = int16_t(Wire.read() << 8 | Wire.read()) / 131.0; // For a 250deg/s range we have to divide first the raw value by 131.0, according to the datasheet
GyroY = int16_t(Wire.read() << 8 | Wire.read()) / 131.0;
GyroZ = int16_t(Wire.read() << 8 | Wire.read()) / 131.0;
// === Send data (Serial) === //
Serial.print("$");
Serial.print(AccX);
Serial.print("$");
Serial.print(AccY);
Serial.print("$");
Serial.print(AccZ);
Serial.print("$");
Serial.print(GyroX);
Serial.print("$");
Serial.print(GyroY);
Serial.print("$");
Serial.print(GyroZ);
Serial.print("$#");
Serial.println();
currentTime = millis(); // Current time actual time read
elapsedTime = (currentTime - previousTime) ; // Divide by 1000 to get seconds
previousTime = currentTime; // Previous time is stored before the actual time read
int t = (20 - elapsedTime) > 0 ? int(20 - elapsedTime) : 0;
delay(t); //for 50Hz
// Serial.print(elapsedTime);
// Serial.println();
}Verifique se os dados estão sendo enviados corretamente:
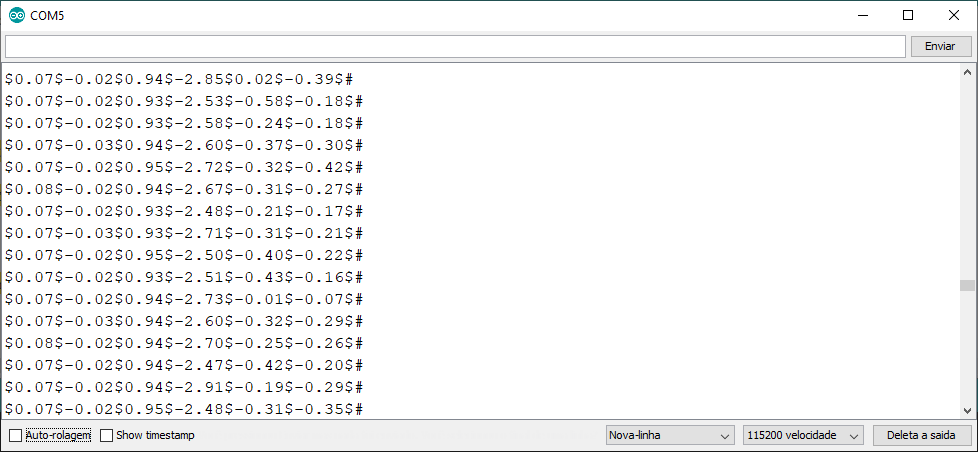
Figura 3 - Dados (raw) do acelerômetro e do giroscópio.
4 - Leitura dos dados (python)
Para realizar a leitura dos dados enviados pelo ESP32 via usb-serial, é necessário instalar a biblioteca pyserial.
Obs.: Se estiver utilizando o Anaconda, vá ao seu prompt de comando e digite:
pip install pyserialCrie um arquivo .py para a leitura correta dos dados, obtendo os valores enviados pelo ESP32 em float. Segue um código exemplo:
### Leitura dos dados da MPU6050
import serial
import time
import numpy as np
import matplotlib.pyplot as plt
import msvcrt
import sys
def getData(serialPort, char_init="$", char_end="#"):
""" Obtém os dados da serial
dado esperado: $ax$ay$az$wx$wy$wz$#
"""
line = serialPort.readline().decode(encoding='utf-8',errors='ignore') #converte bytes para string
line = line.strip("\r\n") #remove tabulação final
try:
if line[0]==char_init:
if line[-1]==char_end:
dados = line.split(char_init)[1:]
dados = dados[:-1] # retira o último elemento #
if len(dados) == 6:
dados = [float(v) for i,v in zip(range(0,6),dados)] #converte para float
return True, dados
return False, [-1,-1,-1,-1,-1,-1]
except:
return False, [-1,-1,-1,-1,-1,-1]
def saveData(data, Acx, Acy, Acz, Gx, Gy, Gz):
""" adiciona os dados recebidos nas devidas listas """
Acx.append(data[0])
Acy.append(data[1])
Acz.append(data[2])
Gx.append(data[3])
Gy.append(data[4])
Gz.append(data[5])
def drawData(Acx, Acy, Acz, Gx, Gy, Gz):
""" Plota os dados obtidos do acelerômetro e giroscópio na forma de histograma e ao longo do tempo """
N = len(Acx)
mean_Acx = np.round(np.mean(Acx),7)
cov_Acx = np.round(np.cov(Acx),7)
mean_Acy = np.round(np.mean(Acy),7)
cov_Acy = np.round(np.cov(Acy),7)
mean_Acz = np.round(np.mean(Acz),7)
cov_Acz = np.round(np.cov(Acz),7)
mean_Gx = np.round(np.mean(Gx),7)
cov_Gx = np.round(np.cov(Gx),7)
mean_Gy = np.round(np.mean(Gy),7)
cov_Gy = np.round(np.cov(Gy),7)
mean_Gz = np.round(np.mean(Gz),7)
cov_Gz = np.round(np.cov(Gz),7)
fig = plt.figure(figsize=(5,5))
ax = fig.add_subplot(231)
ax.hist(Acx, bins=100, color='#e24a33', density=True)
ax.set_title("Acx - média = "+str(mean_Acx))
ax = fig.add_subplot(234)
ax.plot(range(N), Acx,'.')
ax.set_title("Acx - variância = " + str(cov_Acx))
ax = fig.add_subplot(232)
ax.hist(Acy, bins=100, color='#e24a33', density=True)
ax.set_title("Acy - média = "+str(mean_Acy))
ax = fig.add_subplot(235)
ax.plot(range(N), Acy,'.')
ax.set_title("Acy - variância = " + str(cov_Acy))
ax = fig.add_subplot(233)
ax.hist(Acz, bins=100, color='#e24a33', density=True)
ax.set_title("Acz - média = "+str(mean_Acz) )
ax = fig.add_subplot(236)
ax.plot(range(N), Acz,'.')
ax.set_title("Acz - variância = " + str(cov_Acz))
fig = plt.figure(figsize=(5,5))
ax = fig.add_subplot(231)
ax.hist(Gx, bins=100, color='#e24a33', density=True)
ax.set_title("Gx - média = "+str(mean_Gx))
x = np.linspace(min(Gx)-1,max(Gx)+1,N//2)
f = 1/((cov_Gx**0.5)*np.sqrt(2*np.pi))*np.exp(-0.5*((x - mean_Gx)/(cov_Gx**0.5))**2)
ax.plot(x,f,'b')
ax = fig.add_subplot(234)
ax.plot(range(N), Gx,'.')
ax.set_title("Gx - variância = " + str(cov_Gx))
ax = fig.add_subplot(232)
ax.hist(Gy, bins=100, color='#e24a33', density=True)
ax.set_title("Gy - média = "+str(mean_Gy))
x = np.linspace(min(Gy)-1,max(Gy)+1,N//2)
f = 1/((cov_Gy**0.5)*np.sqrt(2*np.pi))*np.exp(-0.5*((x - mean_Gy)/(cov_Gy**0.5))**2)
ax.plot(x,f,'b')
ax = fig.add_subplot(235)
ax.plot(range(N), Gy,'.')
ax.set_title("Gy - variância = " + str(cov_Gy))
ax = fig.add_subplot(233)
ax.hist(Gz, bins=100, color='#e24a33', density=True)
ax.set_title("Gz - média = "+str(mean_Gz) )
x = np.linspace(min(Gy)-1,max(Gz)+1,N//2)
f = 1/((cov_Gz**0.5)*np.sqrt(2*np.pi))*np.exp(-0.5*((x - mean_Gz)/(cov_Gz**0.5))**2)
ax.plot(x,f,'b')
ax = fig.add_subplot(236)
ax.plot(range(N), Gz,'.')
ax.set_title("Gz - variância = " + str(cov_Gz))
plt.show()
if __name__ == "__main__":
Ts = 1/50.0 #tempo de amostragem
serialPort = serial.Serial(port = "COM5", baudrate=115200, bytesize=8, timeout=2, stopbits=serial.STOPBITS_ONE)
serialPort.timeout = 2 # set read timeout
serialPort.flush()
print("Conexão {}".format(serialPort.is_open)) # True for opened
if not serialPort.is_open:
print('serialPort not open')
sys.exit()
Acx, Acy, Acz, Gx, Gy, Gz = [], [], [], [], [], []
t1, t2, t_total = 0.0 , 0.0, 0.0
t1 = time.time()
while True:
t2 = time.time()
dt = t2 - t1
if dt >= Ts:
ok, data = getData(serialPort)
t_total += dt
t1 = t2
if(ok):
saveData(data, Acx, Acy, Acz, Gx, Gy, Gz)
print("---------------------------------")
print("tempo total = {}s".format(t_total))
print(Acx[-1], Acy[-1], Acz[-1], Gx[-1], Gy[-1], Gz[-1])
print("número de amostras = ", len(Acx))
print("---------------------------------")
if msvcrt.kbhit(): # para de capturar os dados após apertar ESC
if ord(msvcrt.getch()) == 27:
break
drawData(Acx, Acy, Acz, Gx, Gy, Gz)Ao rodar o programa, deixando a montagem em uma condição estacionária (considerada como condição inicial), poderá ser obtido dados similares a esse:
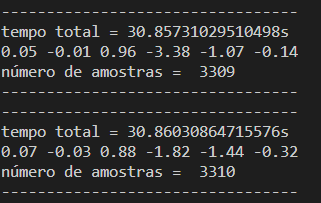
Figura 4 - Resultado no terminal.
Após aproximadamente 3000 amostras, é possível ver a característica normal dos dados na condição estacionária, obtendo um valor de média e de variância. Esses dados serão utilizados para calibrar o sensor e como parâmetro no filtro de Kalman.
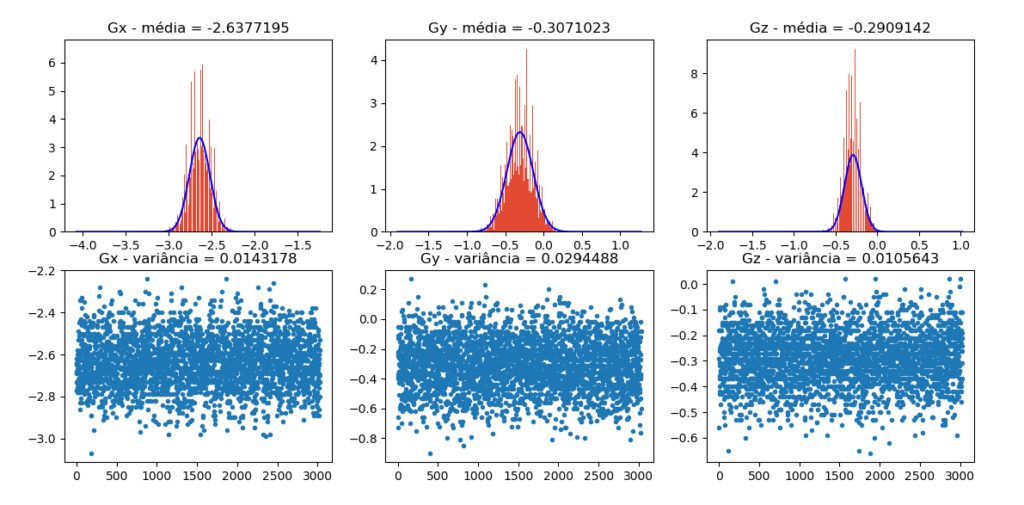
Figura 5 - Dados do giroscópio.
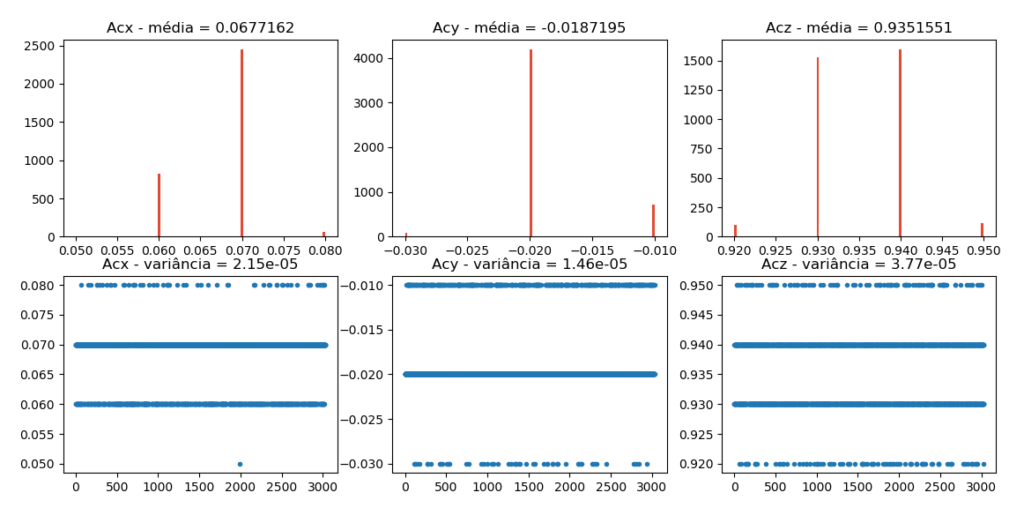
Figura 6 - Dados do acelerômetro.
Obs.: Os dados do acelerômetro possuem uma variância menor do que a do giroscópio.
5 - Obtenção dos ângulos pitch e roll pelo acelerômetro
Podemos obter os ângulos roll e pitch por geometria:
-
roll: [latex] \phi = arctan \left (\frac{a_y}{a_z} \right ) [/latex]
-
pitch: [latex] \theta= arctan \left ( \frac{-a_x}{\sqrt{a_y^2 + a_z^2}} \right ) [/latex]
Podemos definir uma função para retornar esses ângulos:
def getAnglesAcc(data):
""" Retorna o valor de ângulo (pitch e roll) obtido pelo acelerometro """
pitch = np.arctan2(-data[0] , np.sqrt(data[1]**2 + data[2]**2))
roll = np.arctan2(data[1] , data[2])
return pitch*180/np.pi, roll*180/np.piPodemos obter os seguintes valores de ângulos para um movimento do sensor:
- Variação de aprox. 90° em torno de y e depois retorno a posição inicial (x3):
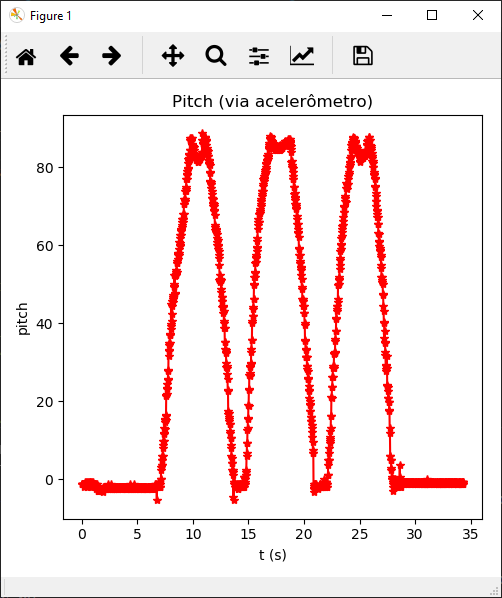
Figura 7 - Dados obtidos do ângulo pitch por meio do acelerômetro.
Variação de aprox. 90° em torno de x e depois retorno a posição inicial (x3):
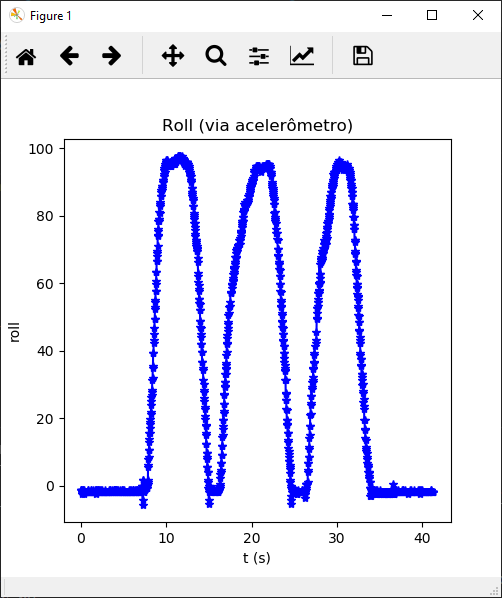
Figura 8 - Dados obtidos do ângulo roll por meio do acelerômetro.
6 - Obtenção por Integração numérica dos dados do giroscópio
7 - Fusão sensorial
Outros
Calibração do Magnetômetro
https://github.com/kriswiner/MPU6050/wiki/Simple-and-Effective-Magnetometer-Calibration