ESP32 #08 - ROS + ESP32 + Ultrasom + LCD I2C + Servo motor
Neste artigo, iremos desenvolver um sistema com ROS e ESP32, obtendo informações de um ultrassom, acionando um servo motor e mostrando os dados em um LCD via I2C.
Obs.: Não deixe de ver os passos iniciais do artigo ESP32 #07.
Conexões
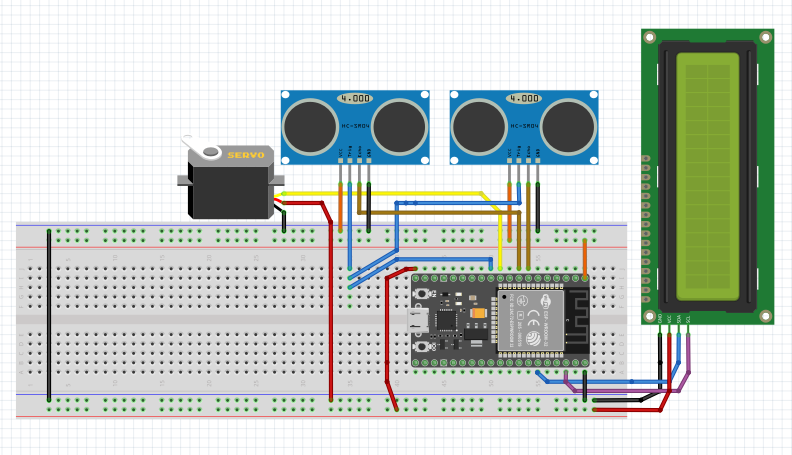
Elaborado no Fritzing
Bibliotecas
-
Rosserial: ros_lib.zip
- Extraia o .zip na pasta libraries. Essa pasta foi gerada a partir do artigo ESP32 #07.
-
LCD Crystal I2C: https://github.com/fdebrabander/Arduino-LiquidCrystal-I2C-library
- Faça download da biblioteca e salve na basta Arduino/libraries com o nome “LiquidCrystal_I2C”.
-
Servo motor com ESP32: https://github.com/RoboticsBrno/ESP32-Arduino-Servo-Library/archive/master.zip
- Extraia o .zip na pasta libraries e renomeie-a para Servo
-
HC-SR04: https://github.com/d03n3rfr1tz3/HC-SR04
- No Gerenciador de bibliotecas procure por HC-SR04 e instale a biblioteca.

Reinicie a IDE do Arduino para que as bibliotecas sejam reconhecidas.
Código
Teste inicial (sem o ROS)
/**
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <HCSR04.h>
// Pinos do ultrassom
byte triggerPin = 27;
byte echoCount = 2;
byte* echoPins = new byte[echoCount] { 33, 34 };
String mytext = "info";
// Set the LCD address to 0x27 for a 16 chars and 2 line display
LiquidCrystal_I2C lcd(0x27, 16, 2);
void setup()
{
Serial.begin(115200);
lcd.begin();
lcd.clear();
lcd.backlight();
lcd.setCursor(0, 0);
Serial.println("LCD OK");
lcd.print("Inicializando...");
HCSR04.begin(triggerPin, echoPins, echoCount);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Pronto!");
Serial.println("Pronto!");
}
void loop()
{
// Verifica se tem algum dado na serial
if (Serial.available()) {
mytext = Serial.readString();
// Remove o caracter \n do final da string
unsigned int mesgLen = mytext.length();
mytext[mesgLen - 1] = ' ';
// Mostra no LCD
lcd.clear();
lcd.setCursor(0, 1);
lcd.print(mytext);
}
// Realiza as medições do sensores de distância
double* distances = HCSR04.measureDistanceCm();
lcd.clear();
for (int i = 0; i < echoCount; i++) {
if (i == 0){
lcd.setCursor(11, 0);
lcd.print(distances[i]);
}
if (i == 1){
lcd.setCursor(11, 1);
lcd.print(distances[i]);
lcd.setCursor(0, 1);
lcd.print(mytext);
}
}
}Enviando e recebendo os dados no ROS
/**
*/
#define ROSSERIAL_ARDUINO_TCP
#include <WiFi.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <HCSR04.h>
#include <Servo.h>
#include <ros.h>
#include <ros/time.h>
#include <std_msgs/Float32.h>
#include <std_msgs/String.h>
// WIFI config
const char* ssid = "REDE NET 16";
const char* password = "2083688600";
// Defina o endereço IP do servidor do soquete (rosserial)
IPAddress server(192,168,0,5);
// Defina a porta do servidor do soquete (rosserial)
const uint16_t serverPort = 11411;
///////////////////
// ROS config
ros::NodeHandle nh;
///////////////////
// Ultrassom
byte triggerPin = 27;
byte echoCount = 2;
byte* echoPins = new byte[echoCount] { 33, 34 };
std_msgs::Float32 msg_ultrassom;
//sensor_msgs::Range msg_ultrassom;
ros::Publisher pub_ultrassom_esquerda( "/ultrassom_esquerda", &msg_ultrassom);
ros::Publisher pub_ultrassom_direita( "/ultrassom_direita", &msg_ultrassom);
//char frameid[] = "/ultrassom";
///////////////////
// LCD
// Set the LCD address to 0x27 for a 16 chars and 2 line display
String mytext = "conectado";
LiquidCrystal_I2C lcd(0x27, 16, 2);
//atualiza o lcd
void callback_lcd( const std_msgs::String& msg){
mytext = msg.data;
lcd.setCursor(0, 1);
lcd.print(" "); //clear space
lcd.setCursor(0, 1);
lcd.print(mytext);
}
ros::Subscriber<std_msgs::String> sub_lcd("/lcd", &callback_lcd );
///////////////////
// Servo motor
float servo_pos = 0;
const int pinoServo = 26;
Servo servo;
//atualiza o angulo do servo motor
void callback_servo( const std_msgs::Float32& msg){
servo_pos = msg.data;
servo.write(servo_pos);
}
ros::Subscriber<std_msgs::Float32> sub_servo("/servo_pos", &callback_servo );
///////////////////
void setup()
{
Serial.begin(115200);
// Inicializa lcd
lcd.begin();
lcd.clear();
lcd.backlight();
lcd.setCursor(0, 0);
Serial.println("LCD OK");
lcd.print("Inicializando...");
// Inicializa ultrassom
HCSR04.begin(triggerPin, echoPins, echoCount);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Pronto!");
Serial.println("Pronto!");
// Inicializa servo motor
servo.attach(pinoServo);
servo.write(0); //inicia na posição 0
// Inicializa wifi
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
Serial.println("IP Adress: ");
Serial.println(WiFi.localIP());
Serial.println("");
// Inicializa nó ROS
// Definindo a conexão com o servidor do soquete (rosserial)
nh.getHardware() -> setConnection(server, serverPort);
nh.initNode();
while (nh.getHardware() ->connected()!=1) {
nh.getHardware() -> setConnection(server, serverPort);
nh.initNode();
delay(50);
Serial.print(".");
}
Serial.print("\nOK TCP-IP = ");
Serial.println(nh.getHardware() -> getLocalIP());
// Publishers
nh.advertise(pub_ultrassom_direita);
nh.advertise(pub_ultrassom_esquerda);
//Subscribers
nh.subscribe(sub_servo);
nh.subscribe(sub_lcd);
}
void loop()
{
if (nh.getHardware() ->connected()) {
// Realiza as medições do sensores de distância
double* distances = HCSR04.measureDistanceCm();
lcd.clear();
for (int i = 0; i < echoCount; i++) {
if (i == 0){
lcd.setCursor(0, 0);
lcd.print("servo=");
lcd.print(servo_pos);
lcd.setCursor(11, 0);
lcd.print(distances[i]);
msg_ultrassom.data = distances[i];
pub_ultrassom_esquerda.publish(&msg_ultrassom);
}
if (i == 1){
lcd.setCursor(11, 1);
lcd.print(distances[i]);
lcd.setCursor(0, 1);
lcd.print(mytext);
msg_ultrassom.data = distances[i];
pub_ultrassom_direita.publish(&msg_ultrassom);
}
}
nh.spinOnce();
delay(1/10); // 10Hz
}
else{
Serial.println("desconectado\n");
while (nh.getHardware() ->connected()!=1) {
nh.getHardware() -> setConnection(server, serverPort);
nh.initNode();
delay(50);
Serial.print(".");
}
}
}No PC abra dois terminais, no primeiro rode:
roscore
e no segundo:
rosrun rosserial_python serial_node.py tcp 11411
Para visualizar os dados do ultrassom, abra outro terminal:
rostopic echo /ultrassom_esquerda
Para enviar um dado para o servo motor:
rostopic pub /servo_pos std_msgs/Float32 "data: 180.0"
Para enviar um dado para o lcd:
rostopic publcd std_msgs/String "data: 'teste'"